Getting Started
Setting up the Nvidia Jetson Orin Nano
Installation Guide
GPS Module Configuration
Meshtastic Configuration
GPS Visualization Setup
ODESC V4.2 Motor Configuration and Setup
Managing USB Devices
Concepts
Obstacle Detection
Navigation
Communication
ROS2
Tutorials
Writing CML Files
Using RoboFlock’s Topics
Troubleshooting and Debugging
Making Launch Files
Creating the URDF
Working with Nav2
RoboFlock Codebase
ultrasonic_pkg
beacon_pkg
Hardware Components
Nvidia Jetson Orin Nano Super Developer Kit
Arduino Nano
RPLIDAR A1M8 Laser Range Scanner
Ultrasonic Distance Sensor
MPU-6050 Motion Tracking Module
NEO-M8P-2 GNSS/GPS Module
ZED-F9P-02B GNSS/GPS Module
HC-12 Wireless Serial Port Module
MAX17048 Fuel Gauge and Battery Monitor
ODESC V4.2 Brushless Servo Motor Controller
Brushless DC Planetary Geared Motor
25.2V Lithium Ion Battery
Construction
Design Overview
Frame and Extrusion
Drive System
Suspension
Hull and Enclosures
Fabrication Guide
Parts Catalog
Hardware Catalog
Wiring Specifications
Future Considerations
Additional Information
Appendix A
Appendix B
Glossary
Bibliography
Mathematics References
Photo and Videos
Contact Us
RoboFlock
Construction
Wiring Specifications
View page source
Previous
Next
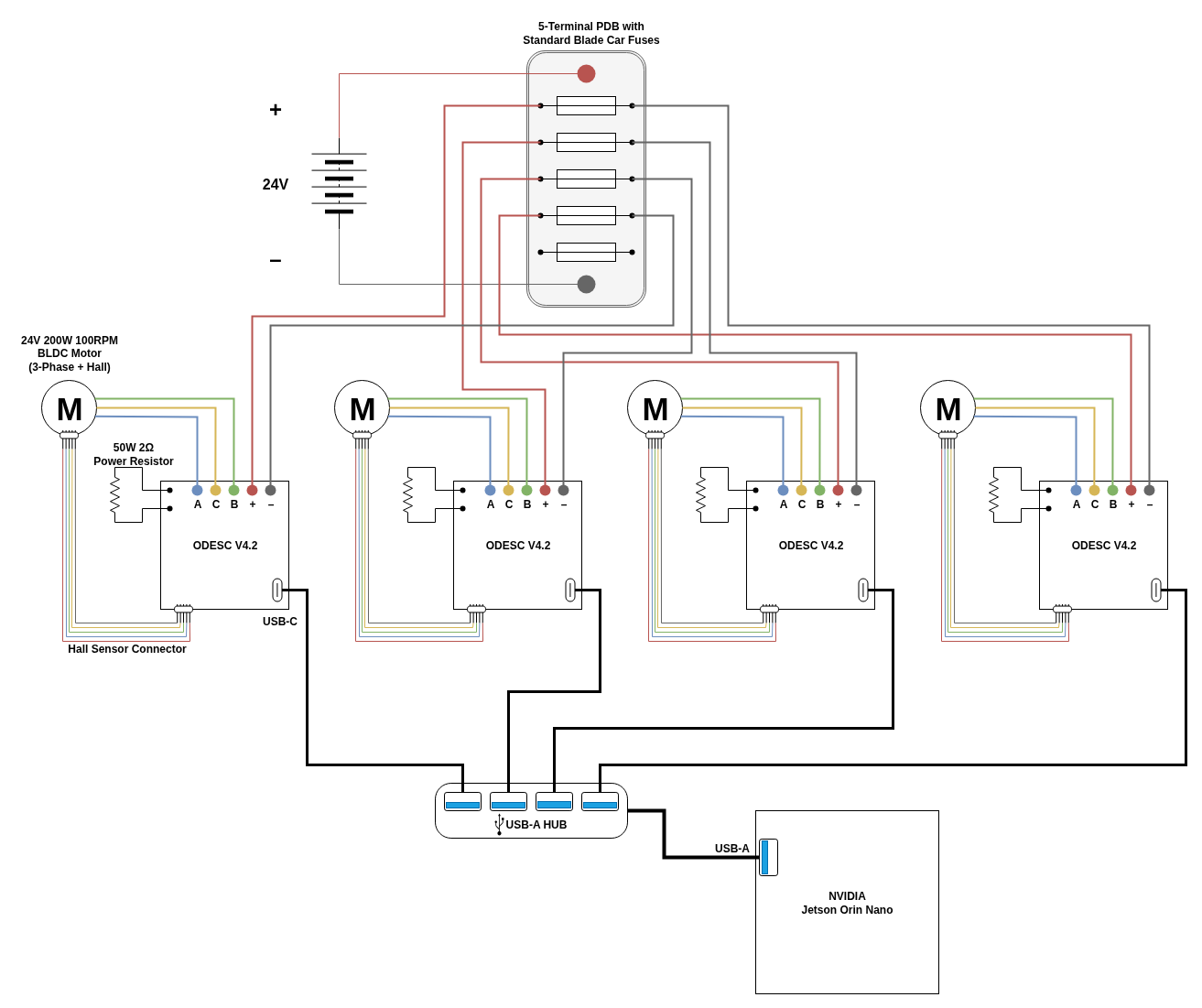
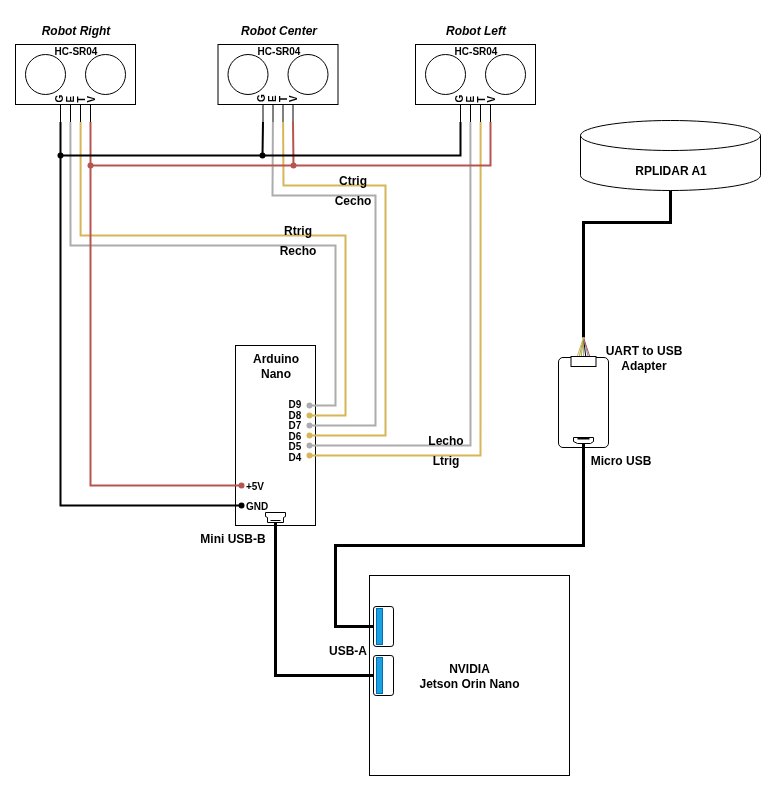
Wiring Specifications
Motor System
Obstacle Detection System